
Robora
Role: Lead UX Designer
Duration: 5 weeks
Tools: Figma, Arduino
System: Hardware, Mobile App
Context: California College of the Arts, MDes 2016
Empowering independent movement for children with spastic cerebral palsy
Robora is a wearable EMG-powered therapy system and caregiver-connected mobile app designed to help children improve fine motor control through real-time, rewarding feedback.
led the end-to-end design, from systems research and physical prototyping to app UX and testing, during my Master’s at California College of the Arts. The project combined IoT, UX, and human-centered assistive design to foster autonomy and reduce caregiver strain.
The Problem
Understanding the care ecosystem
Millions of children with spastic cerebral palsy (CP) lack consistent access to in-person therapy. This leads to stalled progress, dependence on caregivers, and burnout across the care network.
I began by mapping the care network around a child with Cerebral Palsy, including caregivers, therapists, educators, and extended family.
Insight: Most tools focus on the child, but ignore the stress points between stakeholders.

Understanding the user
Henry is 7 years old and has spastic CP. He struggles with:
Holding a pencil
Grasping a spoon
Turning book pages
Without regular PT sessions, his motor development is regressing. His mother tries to help him each night, but lacks confidence and guidance.

Caregiver, user interview
“I try to help him practice holding a spoon every night, but it’s hard to know if I’m doing it right or if it’s even helping.”
The Opportunity
How might we…
Empower children with CP in their fine motor journey?
Enable moments of independence, even without a therapist present?
Reduce the stress and guesswork for caregivers?
The Solution
The Wearable Arm Brace
A system that includes assistive wearable technology that encourages and empowers independent motor function, that works with the mobile app for caregivers to track and easily manage the patient’s progress.
Design Principle: Feedback without Friction
The system rewards effort in real-time, without screens, lags, or frustration.
For the patient, the arm brace creates a repeatable, feedback-driven motor task using:
EMG sensors: Capture muscle intent, not just movement, ideal for children with limited range.
LED sequences: Visually guide the child through open/close hand motions.
Vibration motors: Reinforce successful motion with gentle haptic feedback.
State: no movement detected

State: Begins movement, not there yet

State: Achieves optimal movement

Vibration motor placement
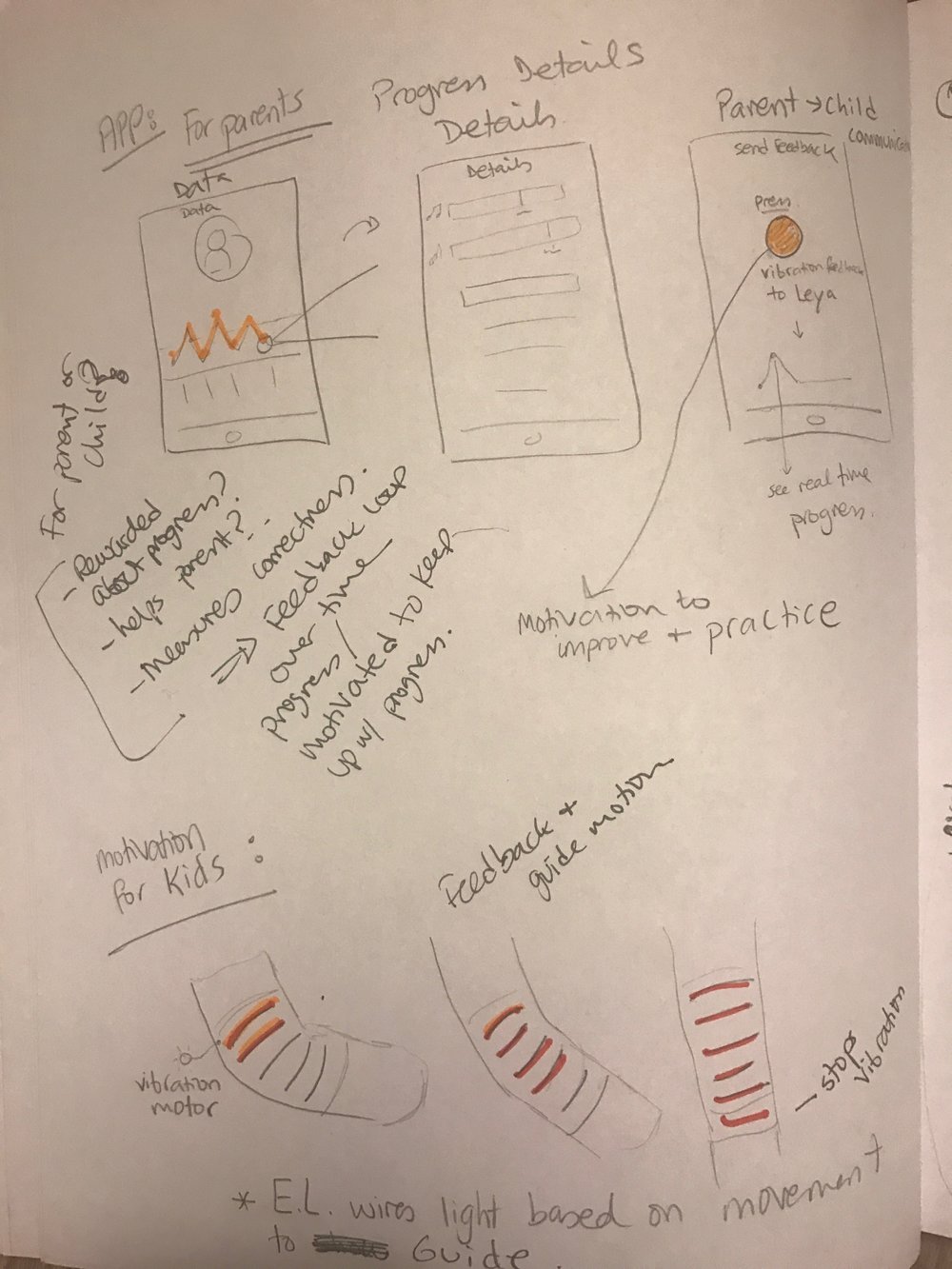
The Companion App
For caregivers and therapists, the app offers:
Goal setting and progress (see improvements over time)
Progress visualization and understanding (understand key insights and ways to improve)
Care network sharing (export sessions to doctors and therapists)
Key learning: Caregivers wanted visibility, not extra work.

Design & Prototyping
Exploration and Ideation
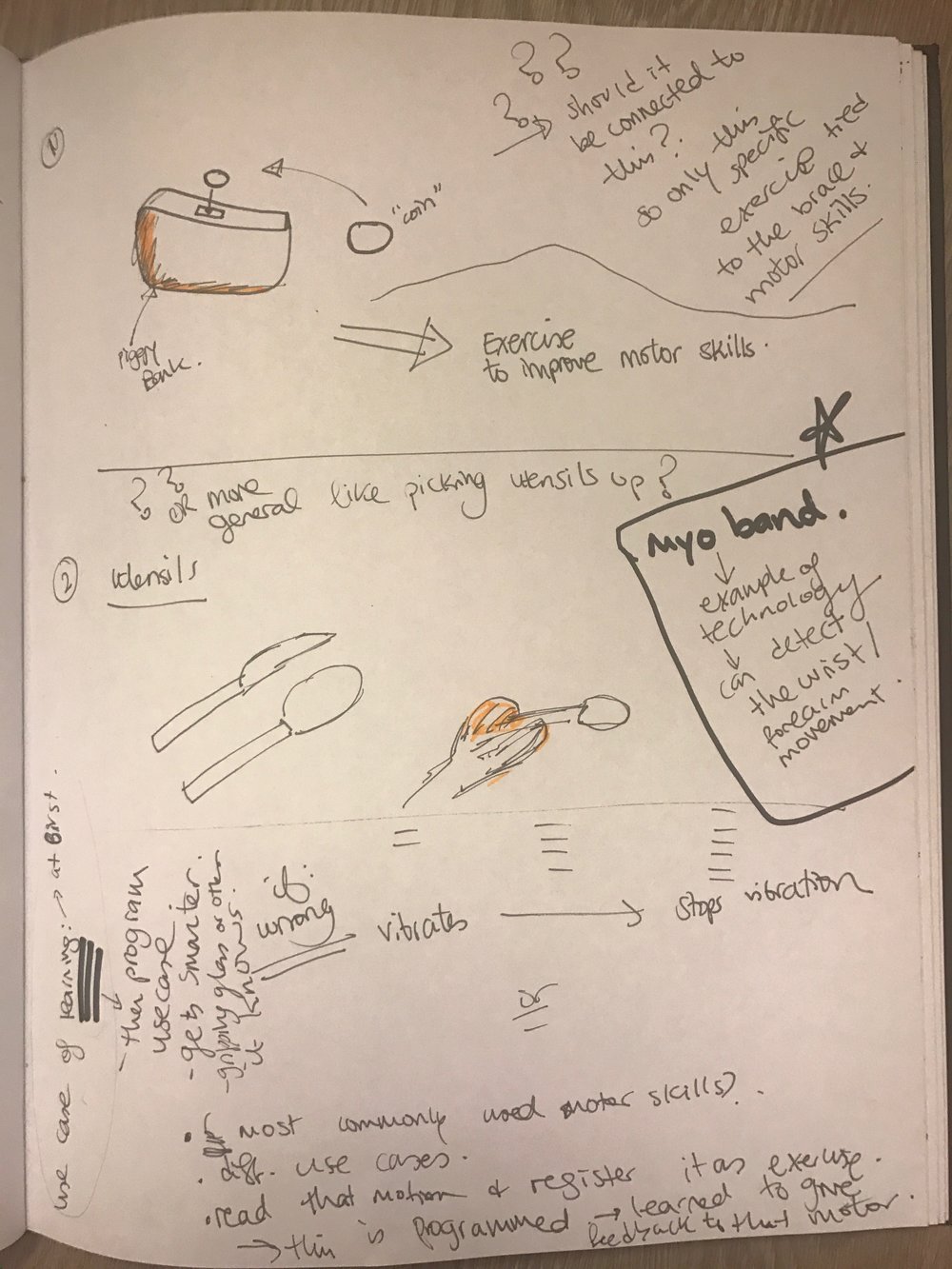
I started with quick sketches to explore:
Wearable form factors
Sensor and motor placements
Storyboarding the intersection between the app and wearable technology experience


Next Steps & Reflection
Opportunities to Scale
Add machine learning to personalize exercises
Expand the app with therapist-guided modules
Develop flexible sensor placement for different limb types
Reflection
This project taught me how to design holistically, across hardware, software, and emotional touchpoints, while always centering dignity and autonomy.